「アドオン型」スキルアップセミナー Upgrade Formula-上達の公式-の「構成と内容」を紹介します。
構成・内容
カリキュラム
スケジュール
Motion Fitting(タイトル・テーマ)StepⅠ・StepⅡ
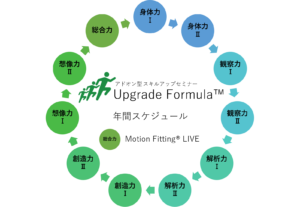
Upgrade Formula(タイトル・テーマ)StepⅠ・StepⅡ・StepⅢ
※テーマは変更することがあります
カリキュラム
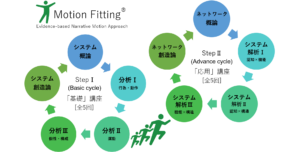

Upgrade Formula-上達の公式-は「思考」と「技術」の2部構成。AMは動きの個性に着目したシステムアプローチメソッドMotion Fitting®で「思考」を磨き、PMはセラピストの骨太な土台を創るUpgrade Formulaで「技術」を磨きます。例えば「身体力を磨くⅠ」のときは、AM「システム概論」PM「身体力を磨くⅠ」のように、1回のセミナーで「2」タイトル「20~24」のテーマを体感・共感・実感しながら、理解・習得していきます。※同じStep・色のタイトルを同日に学びます。セミナーはどのタイトルからでも受講できるスパイラル形式(StepⅡは同色のStepⅠ受講済・StepⅢはStepⅠ・Ⅱの終了が必要)。いつでも・どのタイミングでも参加できるようになっています。
StepⅠは「知って・わかって・使う」
原理・原則を学び、動きの知識・技術の「本質」を見極めます。現在の知識・技術にアドオンすれば、効果が上がるだけでなく「根拠」も明確になるから、自身の知識・技術に「自信」がつきます。
StepⅡは「自由自在に使いこなす」
相互作用を学び、動きの知識・技術を「知能・技能」へと昇華させます。StepⅠにアドオンすれば、いかなる状況に対しても「臨機応変」に対応できるから、自身の徒手療法に「確信」が持てます。さらに、自身のからだも調整できるようになり、からだの負担が劇的に減ります。
StepⅢは「動きを俯瞰(ふかん)する」
視座を学び、動きの知能・技能を「助言・指導」へと拡張させます。StepⅡにアドオンすれば、患者・学生・セラピストに対して「適切」に助言・指導できるから、動きへの理解がさらに深まります。
テーマ
テーマは「解説」「体感・共感・実感」「補足説明」の流れで進みます。自身のからだで体感・共感・実感するので、「思考」も「技術」も理解が深まります。
メールサポート
新しい「思考」や「技術」を学ぶとき、セミナーを受講しただけですべてを吸収するのは「至難の業」。そこでセミナー終了後から4週間(20日)、メールでサポートして習得を後押しします(通称メルサポ)。月曜から金曜まで「毎朝」メールが届きます。1日2テーマ、4週間で全てのテーマを2回復習します。メールなので「朝に読んで、すぐに復習」「昼休みに読んで、午後に復習」「寝る前に読んで、翌日に復習」自分のペース・スタイルに合わせて復習できます。
Motion Fitting® LIVE

さらに「総合力を磨く(スケジュール参照)」はMotion Fitting® LIVE!
何を「感じて」どのように「考えている」のか、私の思考の全てをLIVEで伝えながら「実践デモ」。受講者からの質問もその場で回答します。重要なポイントをPickupして演習し「総合力」を磨きます。はじめての方は「予習」として、受講歴があれば「復習と実践のアイディア」として活用できます。他のセラピストの頭の中をLIVEで「覗(のぞ)き見る」ことのできる貴重な機会です。
Motion Fitting® LIVE
Upgrade Club通信
さらにさらに、Upgrade Formula LINE公式アカウントでは、臨床に役立つ情報を「毎日」配信しています。
【月曜日】「書感」
「専門書」をあえて避け、直感で参考になると選書した「文庫・新書」を読破して、率直に感想を述べてます。
【火・金・日曜日】「見解・雑感・共感」
「見解」は専門的な内容、「雑感」はノージャンル、「共感」はシェアしたい情報を自由気ままに綴ってます。
【水曜日】「探究のリテラシー」
ものごとの本質を見極める方法論、それが探究のリテラシー。研究方法論の基礎をじっくりと深掘りします。
【木曜日】「解トレ新書」
「またわり」に続き、実証・実験シリーズ第二弾!従来のストレッチやトレーニングが果たして効果的なのか?自らのからだで検証!「実践編」では従来の方法を行い問題点を抽出して新たな方法を創造、「解説編」では新たな方法を行い身体システムで解析して利点を解説します。
【土曜日】「骨太な土台づくり」
「骨太なセラピストの土台を創る」をコンセプトにUpgrade Formulaの構成に沿った基本的な「思考」や「練習法」等の紹介
Upgrade Club通信はLINE公式アカウントへの「登録(無料)」で読むことができます。「ブロック・解除」で退会も自由!

スケジュール
Upgrade Formula-上達の公式-は毎月1回、日曜日に開催しています。StepⅠ・StepⅡを交互に行うので、それぞれのStepは2カ月に1回。無理のないペースで参加できます。Stepの流れに合わせて受けるも良し、興味のあるタイトルだけを受けるも良し、同じタイトルをStepⅠ・StepⅡ続けて受けるも良し、毎月受ければ1年で全て終了することも可能。自分のペース・スタイルで自由にカスタマイズできるスケジュールになっています。
Motion Fitting
StepⅠ(Basic cycle)「基礎講座」
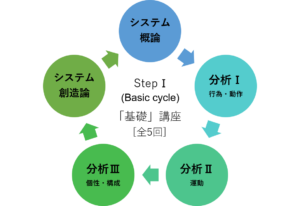
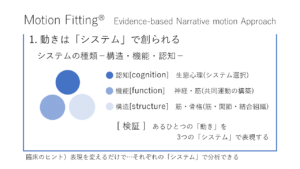
システム概論
動きは「システム」で創る
テーマ
- 動きは「型」がない(動きの構造①)
- 動きは「入れ子」である(動きの構造②)
- 動きは「気付き」で決まる(動きの選択①)
- 動きは「レシピ」がある(動きの選択②)
- 我動く!ゆえに我あり!(動きの目的・意味)
- 「好み(指向性)」が個性を決める①(個性の創造[形態])
- 「好み(指向性)」が個性を決める②(個性の創造[定位])
- 「好み(指向性)」が個性を決める③(個性の創造[下肢])
- 「好み(指向性)」が個性を決める④(個性の創造[上肢])
- 「好み(指向性)」が個性を決める⑤(個性の創造[歩行])
分析Ⅰ
行為[action]分析 動きの「心理学」-巨視的(macroscopic)分析-
動作[movement]分析 動きの「力学」-中視的(mesoscopic)分析-
テーマ
- 動きは「視座」で分析する(分析の全体像①)
- 動きは「結果であり・原因でもある」(分析の全体像②)
- 「空間」が動きを決める(行為[action]分析①)
- 「身体」が動きを決める(行為[action]分析②)
- 「感情」が動きを変える(行為[action]分析③)
- 「好み(指向性)」が動きを決める(行為[action]分析④)
- 動きは姿勢を「つなぐ」(動作[movement]分析①)
- 動きはパーツ(Body segment)に分ける(動作[movement]分析②)
- 動きは 定位と合目的的活動の「dual-task(二重課題)」(動作[movement]分析③)
- 動きは「配置」で決まる(動作[movement]分析④)
分析Ⅱ
運動[motion]分析 動きの「システム(総論)」-微視的(microscopic)分析-
テーマ
- 動きは「システム」で創られる(システムの種類)
- システムは「層(layer)」構造(システムの構造)
- 「参照情報」が動きを決める(運動[motion]分析①)
- 「制御部位」が動きを決める(運動[motion]分析②)
- 「指向性」が動きを決める(運動[motion]分析③)
- 動きは「内側から外側」へ連鎖する(運動[motion]分析④)
- 動きは「遠位から近位」へ連鎖する(運動[motion]分析⑤)
- 動きは「形態層(最深層)」で連結する(運動[motion]分析⑥)
- 動きは「配置」で変わる(運動[motion]分析⑦)
- 動きは「粘弾性と滑走性」を変える(運動[motion]分析⑧)
分析Ⅲ
動きの「システム(各論)」
-基礎[指向性(directivity)]解析-
-構成[効率性(efficiency)]分析-
テーマ
- 動きは「context(背景)とscript(文脈)」で創られる(個性の構造)
- 機能が構造を「創造」し、構造が機能を「制約」する(個性の構築)
- 「個性」を確認する(基礎context[背景]解析①)
- 「可動性」を確認する(基礎context[背景]解析②)
- 「活動」を推察する(基礎context[背景]解析③)
- 「可動性」を推察する(基礎context[背景]解析④)
- 「心情」を推察する(認知script[文脈]解析)
- 「反応と連鎖」①(構成[効率性]分析①[内側])
- 「反応と連鎖」②(構成[効率性]分析②[外側])
- 「連鎖と連結」(構成[効率性]分析③[統合])
システム創造論
システム創造の「アルゴリズム」
Motion Fitting Method ①
テーマ
- 指向性を「情報×部位」で確認する(創造の準備)
- 個性に合致した動きを創造する(創造の原則①[運動感])
- 個性に合致した情報で創造する(創造の原則②[理解度])
- 「構造」から「機能」そして「認知」へ(創造のアルゴリズム①)
- 「適合性・粘弾性・滑走性」をoptimize(最適化)する(創造のアルゴリズム②)
- 「連鎖」と「連結」で創造する(創造のアルゴリズム③)
- 「強調」と「初期化」で調整する(創造のアルゴリズム④)
- 「環境」で強化する(創造のアルゴリズム⑤)
- 「情報収集」から「分析・解析」そして「調整・創造」へ(Motion Fitting のアルゴリズム①)
- 「システム強化」から「機能拡張」そして「バックアップ構築」へ(Motion Fitting のアルゴリズム②)
StepⅡ(Advance cycle)「応用講座」
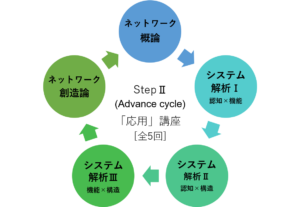
ネットワーク概論
動きはシステムの「interaction(相互作用)」-総論-
テーマ
- 動きは定位と合目的的活動の「dual-task(二重課題)」(動きの構成①)
- 動きは構造・機能・認知の「システム」で創る(動きの構成②)
- 「冗長性」が多様性(個性)を創る(動きのシステム①)
- 「分散性」が多様性(個性)を創る(動きのシステム②)
- 「自由度」が多様性(個性)を創る(動きのシステム③)
- 多様性(個性)は情報への「指向性」(個性の創造①)
- 多様性(個性)を決める「schema(図式)」と「script(文脈)」(個性の創造②)
- システム障害へのネットワーク対応①(認知システムとの「interaction[相互作用]」)
- システム障害へのネットワーク対応②(機能システムとの「interaction[相互作用]」)
- システム障害へのネットワーク対応③(構造システムとの「interaction[相互作用]」)
システム解析Ⅰ
システムの「interaction(相互作用)」-各論-
「認知システム×機能システム」
テーマ
- 機能が認知(図式)を「創造」し、認知(図式)が機能を「制約」する(システムの関係性[認知システム⇔機能システム])
- システムの「interaction(相互作用)」①(ネットワーク対応[認知システム])
- 参照情報が「連鎖・連結」を変える(システム解析[認知→機能]①)
- 制御部位が「連鎖・連結」を変える(システム解析[認知→機能]②)
- 指向性が「連鎖・連結」を変える(システム解析[認知→機能]③)
- システムの「interaction(相互作用)」②(ネットワーク対応[機能システム])
- 結合・崩壊と「schema(図式)」①(システム解析[機能→認知]①形態・定位)
- 結合・崩壊と「schema(図式)」②(システム解析[機能→認知]②合目的的活動)
- 結合・崩壊と「schema(図式)」③(システム解析[機能→認知]③肢節連結)
- 「primary(最初)」を同定する(システムの微分・積分[機能システム])
システム解析Ⅱ
システムの「interaction(相互作用)」-各論-
「認知システム×構造システム」
テーマ
- 動かなければ感じない、感じなければ動けない(システムの関係性[認知システム⇔構造システム])
- システムの「interaction(相互作用)」①(ネットワーク対応[認知システム])
- 参照情報が「可動性」を変える(システム解析[認知→構造]①)
- 制御部位が「可動性」を変える(システム解析[認知→構造]②)
- 指向性が「可動性」を変える(システム解析[認知→構造]③)
- システムの「interaction(相互作用)」②(ネットワーク対応[構造システム])
- 可動性と「schema(図式)」①(システム解析[構造→認知]体幹)
- 可動性と「schema(図式)」②(システム解析[構造→認知]四肢)
- 可動性と「schema(図式)」③(システム解析[構造→認知]肢節連結)
- 「primary(最初)」を同定する(システムの微分・積分[認知システム])
システム解析Ⅲ
システムの「interaction(相互作用)」-各論-
「機能システム×構造システム」
テーマ
- 機能が構造を「創造」し、構造が機能を「制約」する(システムの関係性[機能システム⇔構造システム])
- システムの「interaction(相互作用)」①(ネットワーク対応[機能システム])
- 結合・崩壊と「可動性」①(システム解析[機能→構造]形態・定位)
- 結合・崩壊と「可動性」②(システム解析[機能→構造]合目的的活動)
- 結合・崩壊と「可動性」③(システム解析[機能→構造]肢節連結)
- システムの「interaction(相互作用)」②(ネットワーク対応[構造システム])
- 可動性と「結合・崩壊」①(システム解析[構造→機能]体幹)
- 可動性と「結合・崩壊」②(システム解析[構造→機能]四肢)
- 可動性と「結合・崩壊」③(システム解析[構造→機能]肢節連結)
- 「primary(最初)」を同定する(システムの微分・積分[構造システム])
ネットワーク創造論
ネットワーク創造(システム管理)の「アルゴリズム」
Motion Fitting Method ②
テーマ
- ネットワークが個性を「創造」し、個性がシステムを「制約」する(システム・ネットワークの関係)
- 「システム強化」から「機能拡張」そして「バックアップ構築」へ(Motion Fitting のアルゴリズム)
- タイプ別システム管理①(胸骨-弾性制御[St-E])型①システム強化
- タイプ別システム管理①(胸骨-弾性制御[St-E])型②機能拡張
- タイプ別システム管理①(胸骨-弾性制御[St-E])型③バックアップ構築
- タイプ別システム管理②(胸骨-剛性制御[St-S])型①システム強化
- タイプ別システム管理②(胸骨-剛性制御[St-S])型②機能拡張
- タイプ別システム管理②(胸骨-剛性制御[St-S])型③バックアップ構築
- タイプ別システム管理③(仙骨-弾性制御[Sa-E])型①システム強化
- タイプ別システム管理③(仙骨-弾性制御[Sa-E])型②機能拡張
- タイプ別システム管理③(仙骨-弾性制御[Sa-E])型③バックアップ構築
- タイプ別システム管理④(仙骨-剛性制御[Sa-S])型①システム強化
- タイプ別システム管理④(仙骨-剛性制御[Sa-S])型②機能拡張
- タイプ別システム管理④(仙骨-剛性制御[Sa-S])型③バックアップ構築
Upgrade Formula
StepⅠ(Basic cycle)「基礎講座」
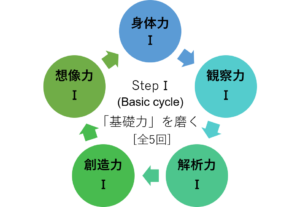
身体力を磨くⅠ
「感覚」を研ぎ澄ます
-セラピストの「掌」-
テーマ
- 掌の感受性を高める(探索の準備)
- 身体を動かす前に「心」を動かす(調整の心構え)
- 掌で触れる(manual contact[用手接触])
- 掌から伝える①(synchronization[身体の同調]①)
- 掌から伝える②(leading[身体の誘導]①)
- 全身で触れる(total contact[全面接触])
- 全身から伝わる(synchronization[身体の同調]②)
- 全身へ伝える(leading[身体の誘導]②)
- 掌で探索する(palpation[身体の触察])
- 掌で探索しながら動かす(passive motion[他動運動])
観察力を磨くⅠ(含誘導力)
「観る・導く」
-探索する「眼」-
テーマ
- 「視線」を追跡・誘導する(合目的的活動の観察①[誘導力])
- 「尖(さき)」を追跡・誘導する(合目的的活動の観察②[誘導力])
- 「速度(リズム)」を追跡・誘導する(合目的的活動の観察③[誘導力])
- 「形(配置)」を観る(「定位」の観察①)
- 「動き」を観る①(「定位」の観察②)
- 「偏(かたよ)り」を観る(「合目的的活動」の観察①)
- 「動き」を観る②(「合目的的活動」の観察②)
- 「流れ」を追跡する①(「機能システム」の観察①[内側])
- 「流れ」を追跡する②(「機能システム」の観察②[外側])
- 「つながり(連結)」を観る(「機能システム」の観察③[統合])
解析力を磨くⅠ
「動かしながら…感じる」
-探索する「掌」-
テーマ
- 「滑らかさ(適合性)」を感じる(構造システム解析①)
- 「硬さ(粘弾性)」を感じる(構造システム解析②)
- 「滑らかさ(滑走性)」を感じる(構造システム解析③)
- 「膨(ふく)らみ」を感じる(機能システム解析①)
- 「高まり」を感じる(機能システム解析②)
- 「ドミノ倒し(連鎖)」を感じる(機能システム解析③)
- 「締めつけ」を感じる(機能システム解析④)
- 「異常」を感じる(機能システム解析⑤)
- 「動きやすさ」を感じる(認知システム解析①)
- 「動きにくさ」を感じる(認知システム解析②)
創造力を磨くⅠ
「感じながら…動かす」
-創造する「掌」-
テーマ
- 「滑らかさ(適合性)」をoptimize(最適化)する(構造システム調整①)
- 「硬さ(粘弾性)」をoptimize(最適化)する(構造システム調整②)
- 「滑らかさ(滑走性)」をimprove(改善)する(構造システム調整③)
- 「trigger muscle(誘因筋)」の反応性を高める(機能システム調整①)
- 「imbalance(不均衡)」を解消する①(機能システム調整②)
- 「システム」を構築する(機能システム調整③)
- 「imbalance(不均衡)」を解消する②(機能システム調整④[連鎖不良])
- 「imbalance(不均衡)」を解消する③(機能システム調整⑤[結合])
- 「rotator muscle(回旋筋)」の反応性を高める(機能システム調整⑥)
- 「システム」を統合する(機能システム調整⑦)
想像力を磨くⅠ
「想像して…導く」
-誘導する「環境」-
テーマ
- 動きが「決まる」(動きの「決定因子」①)
- 動きを「決める」(動きの「決定因子」②)
- 「接触」を変える①(環境[セラピスト]の調整[手])
- 「接触」を変える②(環境[セラピスト]の調整[全身])
- 「配置」を変える①(環境[セラピスト]の調整[全身])
- 「配置」を変える②(環境[空間]の調整)
- 「手がかり」を与える①(環境[空間]の設定①[定位])
- 「手がかり」を与える②(環境[空間]の設定②[合目的的活動])
- 「経験」を与える①(環境[空間]の活用①[定位])
- 「経験」を与える②(環境[空間]の活用②[合目的的活動])
StepⅡ(Advance cycle)「応用講座」
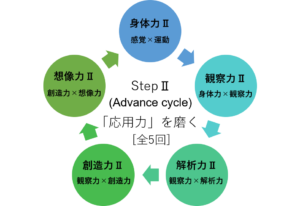
身体力を磨くⅡ
「全身」を研ぎ澄ます
- セラピストの「身体」-
テーマ
- 手掌で探索する(palpation[身体の触察])
- 全身から伝わる(synchronization[身体の同調])
- 自身の「個性」を知る(システムタイプ[型]チェック
- 自身の「構造システム」を磨ぐ①[手掌](palpation[身体の触察]への効果)
- 自身の「構造システム」を磨ぐ②[体幹](synchronization[身体の同調]への効果)
- 自身の「機能システム」を磨ぐ①[形態層](synchronization[身体の同調]への効果)
- 自身の「機能システム」を磨ぐ②[定位層](synchronization[身体の同調]への効果)
- 自身の「機能システム」を磨ぐ③[活動層](触察・同調への効果)
- 自身の「機能システム」を磨ぐ④[初期化](synchronization[身体の同調]への効果)
- 自身の「システムタイプ[型]」の転換(synchronization[身体の同調]への効果)
観察力を磨くⅡ(含介助力)
身体と観察の「interaction(相互作用)」
-「身体力×観察力」の synergy -
テーマ
- 「制御部位」を介助する(定位の介助[介助力])
- 「連鎖(流れ)」を介助する(合目的的活動の介助①[介助力])
- 「速度(リズム)」を介助する(合目的的活動の介助②[介助力])
- 「形(配置)」をマネる(定位のtranscription[転写]①)
- 「動き」をマネる①(定位のtranscription[転写]②)
- 「偏(かたよ)り」をマネる(合目的的活動のtranscription[転写]①)
- 「動き」をマネる②(合目的的活動のtranscription[転写]②)
- 「流れ」をマネる①(機能システムのtranscription[転写]①[内側])
- 「流れ」をマネる②(機能システムのtranscription[転写]②[外側])
- 「つながり(連結)」をマネる(「機能システム」のtranscription[転写]③[統合])
解析力を磨くⅡ
「観察と解析の相互作用(interaction)」
-「観察力×解析力」の synergy -
テーマ
- 計画(予測)はobservation(注視)、実行はcontact(接触)(解析のボディメカニクス)
- 動作(movement)で推定、運動(motion)で確定(解析のアルゴリズム)
- 姿勢変換(臥位→坐位)①(認知システム解析)
- 姿勢変換(臥位→坐位)②(機能システム解析)
- 姿勢変換(臥位→坐位)③(構造システム解析)
- 坐位活動(上肢挙上)①(認知システム解析)
- 坐位活動(上肢挙上)②(機能システム解析)
- 坐位活動(上肢挙上)③(構造システム解析)
- 姿勢変換(坐位→立位)①(認知システム解析)
- 姿勢変換(坐位→立位)②(機能システム解析)
- 姿勢変換(坐位→立位)③(構造システム解析)
- 立位活動(片脚立位・歩行)①(認知システム解析)
- 立位活動((片脚立位・歩行)②(機能システム解析)
- 立位活動((片脚立位・歩行)③(構造システム解析)
創造力を磨くⅡ
「解析と創造の相互作用(interaction)」
-「解析力×創造力」の synergy -
テーマ
- 誘導はverbal command(口頭指示)、強調はresistance(抵抗)(創造のボディメカニクス)
- 運動(motion)で強調、動作(movement)で構築、行為(action)で更新(創造のアルゴリズム)
- 姿勢変換(臥位→坐位)①(構造システム最適化)
- 姿勢変換(臥位→坐位)②(機能システム最適化)
- 坐位活動(上肢挙上)①(構造システム最適化)
- 坐位活動(上肢挙上)②(機能システム最適化)
- 姿勢変換(坐位→立位)①(構造システム最適化)
- 姿勢変換(坐位→立位)②(機能システム最適化)
- 立位活動(片脚立位・歩行)①(構造システム最適化)
- 立位活動((片脚立位・歩行)②(機能システム最適化)
想像力を磨くⅡ(含指導力)
「身体から環境への拡張」
-「創造力×想像力」の synergy -
テーマ
- 強調は「hands-on」、更新は「hands-off」(想像のボディメカニクス)
- 運動(motion)で強調、動作(movement)で構築、行為(action)で更新(想像のアルゴリズム)
- 姿勢変換(臥位→坐位)①(構造・機能システム最適化)
- 姿勢変換(臥位→坐位)②(認知システム最適化)
- 姿勢変換(臥位→坐位)③(認知システム更新)
- 坐位活動(上肢挙上)①(構造・機能システム最適化)
- 坐位活動(上肢挙上)②(認知システム最適化)
- 坐位活動(上肢挙上)③(認知システム更新)
- 姿勢変換(坐位→立位)①(構造・機能システム最適化)
- 姿勢変換(坐位→立位)②(認知システム最適化)
- 姿勢変換(坐位→立位)③(認知システム更新)
- 立位活動(片脚立位・歩行)①(構造・機能システム最適化)
- 立位活動(片脚立位・歩行)②(認知システム最適化)
- 立位活動((片脚立位・歩行)③(認知システム更新)
StepⅢ(Instructor course)「個別指導」
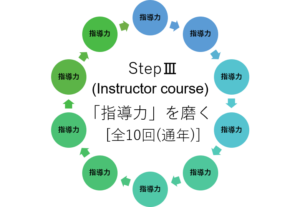
- 個別指導で知識の「深化」と技術のさらなる「向上」を図る
- アシスタントとしてStepⅠ・Ⅱのセミナーに参加して、指導の実践・アドバイスを受ける
料金
StepⅠ・Ⅱ 1回 10,000円
StepⅢ(通年)100,000円(個別指導10回・アシスタント10回)※都度払い可
Upgrade Formula HOME…HOME
受講者の声(感想)…Voice
受講の申し込み…entry
Upgrade Formula Story…STORY
Motion Fittingについて
Motion Fitting 完成までの「経緯」
代表プロフィール…Profile